Results of the Middlebury dataset
We put our results here instead of on the Middlebury evaluation list because our algorithm is designed specifically for the small-baseline multi-view depth estimation problem, such as the light field captured by our camera. However, we cannot find an existing benchmark for this problem. |
1. Rank list:
![]()
All parameters are constant in the four dataset. The results of our multi-view depth estimation are comparable to those of the start-of-the-art stereo algorithms (5th at 4/16/2008). Without applying image segmentation and plane fitting, our superior performance is due to: |
2. Results:
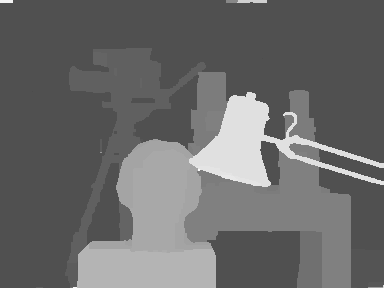
Tsukuba |
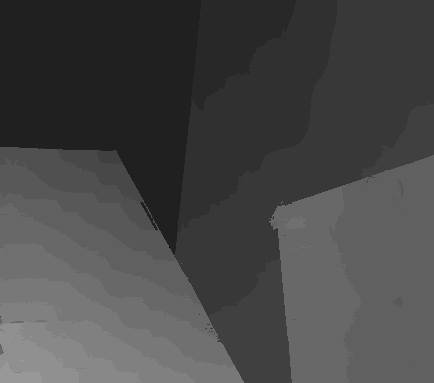
Venus |
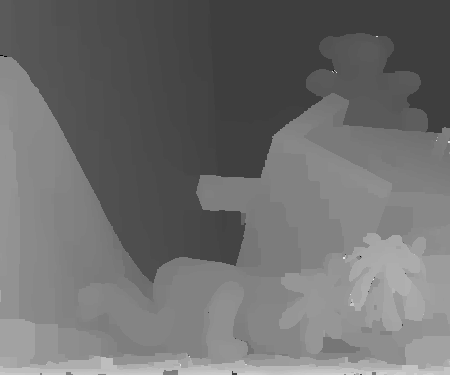
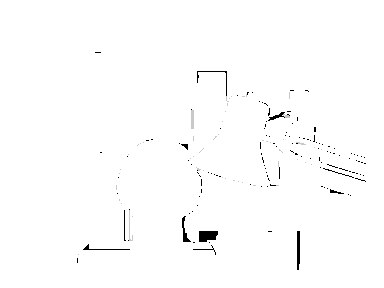
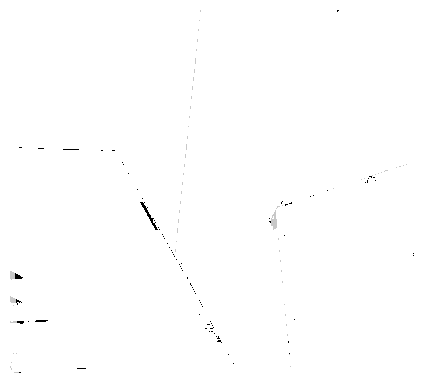
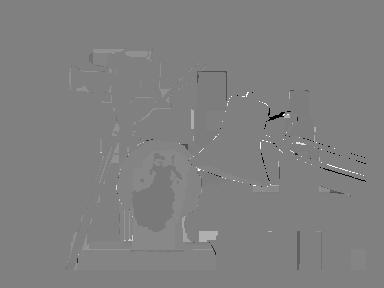
Teddy |
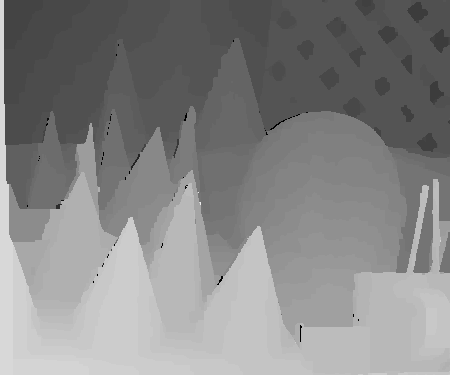
Cones |
|
Estimated disparity map |
 |
 |
 |
 |
Bad pixels (absolute disparity error > 1.0) |
 |
 |
 |
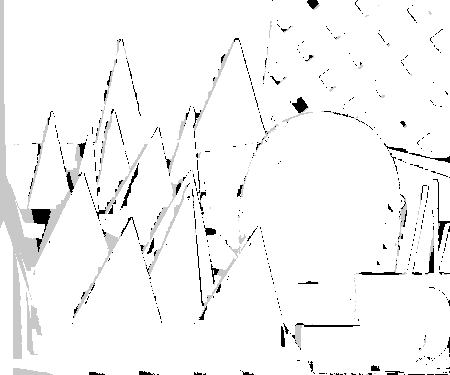 |
Signed disparity error |
 |
 |
 |
 |
The errors are mainly around the aliased object boundaries. Because a projective mutli-texture blending technique is used in the paper, these errors do not affect the results of view interpolation. Please note again that the results are obtained from the multi-view dataset. Some results of other algorithms are shown below for comparison:
|
Last updated: May 3, 2008 |

